有弹性的虫子大小的机器人即使在机翼损坏后也能继续飞行
大黄蜂是笨拙的传单。据估计,一只觅食的蜜蜂大约每秒撞一次花,随着时间的推移,这会损坏它的翅膀。然而,尽管它们的翅膀上有许多微小的裂口或孔洞,大黄蜂仍然可以飞翔。
另一方面,空中机器人的弹性不强。在机器人的机翼马达上戳个洞,或者砍掉它的一部分螺旋桨,它被停飞的可能性很大。
受大黄蜂坚韧不拔的启发,麻省理工学院的研究人员开发了修复技术,使昆虫大小的空中机器人能够承受为其翅膀提供动力的执行器或人造肌肉的严重损坏,但仍能有效飞行。
他们优化了这些人造肌肉,使机器人能够更好地隔离缺陷并克服微小的损坏,例如致动器上的小孔。此外,他们还展示了一种新颖的激光修复方法,可以帮助机器人从严重损坏中恢复,例如烧焦设备的火灾。
使用他们的技术,一个受损的机器人在其人造肌肉之一被 10 针刺伤后可以保持飞行水平的性能,并且执行器在其上烧出一个大洞后仍然能够运行。他们的修复方法使机器人即使在研究人员切断其 20% 的翼尖后仍能继续飞行。
这可以使成群的微型机器人能够更好地在恶劣环境中执行任务,例如在倒塌的建筑物或茂密的森林中执行搜索任务。
“我们花了很多时间来了解柔软的人造肌肉的动力学,并且通过新的制造方法和新的理解,我们可以展示出与昆虫相媲美的抗损伤能力。我们对此感到非常兴奋。但昆虫仍然比我们优越,因为它们可以失去高达 40% 的翅膀,但仍能飞行。我们还有一些追赶工作要做,”电气工程和计算机科学系 (EECS) 助理教授、D. Reid Weedon, Jr.电子研究实验室 (RLE),以及有关这些最新进展的论文的高级作者。
Chen 与共同主要作者和 EECS 研究生 Suhan Kim 和 Yi-Hsuan Hsiao 共同撰写了这篇论文;Younghoon Lee,博士后;Weikun “Spencer” Zhu,化学工程系研究生;任志坚,EECS研究生;Farnaz Niroui,麻省理工学院 EECS 的 EE Landsman 职业发展助理教授和 RLE 的成员。该文章将出现在Science Robotics中。
机器人维修技术
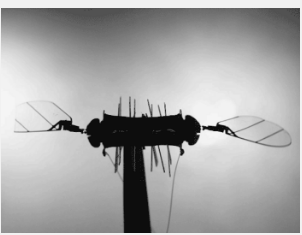
Chen 实验室正在开发的微型矩形机器人的大小和形状与微盒式磁带大致相同,但其中一个机器人的重量仅比回形针重一点。每个角上的翅膀由介电弹性体致动器 (DEA) 提供动力,这是一种柔软的人造肌肉,利用机械力快速拍打翅膀。这些人造肌肉由夹在两个极薄电极之间的多层弹性体制成,然后卷成柔软的管子。当向 DEA 施加电压时,电极会挤压弹性体,从而拍打机翼。
但是微观缺陷会产生火花,从而燃烧弹性体并导致设备出现故障。大约 15 年前,研究人员发现他们可以使用一种称为自清除的物理现象来防止 DEA 因一个微小缺陷而失败。在此过程中,向 DEA 施加高压会断开小缺陷周围的局部电极,将故障与电极的其余部分隔离开来,这样人造肌肉仍然可以工作。
Chen 和他的合作者在他们的机器人维修技术中采用了这种自我清理过程。
首先,他们优化了 DEA 中构成电极的碳纳米管的浓度。碳纳米管是超强但极其微小的碳卷。电极中碳纳米管越少,自清除效果越好,因为它会达到更高的温度并且更容易烧掉。但这也降低了执行器的功率密度。
“在某个时刻,你将无法从系统中获得足够的能量,但我们需要大量的能量和动力来驾驶机器人。我们必须找到这两个约束之间的最佳点——在我们仍然希望机器人飞行的约束下优化自清除特性,”Chen 说。
然而,即使是经过优化的 DEA,如果遭受严重损坏(例如让过多空气进入设备的大孔),也会失效。
陈和他的团队使用激光来克服重大缺陷。他们用激光沿着大缺陷的外轮廓小心地切割,这会在周边造成轻微损坏。然后,他们可以使用自清洁来烧掉轻微损坏的电极,隔离较大的缺陷。
“在某种程度上,我们正在尝试对肌肉进行手术。但如果我们没有使用足够的功率,那么我们就无法造成足够的破坏来隔离缺陷。另一方面,如果我们使用过多的功率,激光会对致动器造成无法清除的严重损坏,”Chen 说。
该团队很快意识到,在这种微型设备上“操作”时,很难通过观察电极来判断它们是否已成功隔离缺陷。借鉴以前的工作,他们将电致发光粒子结合到致动器中。现在,如果他们看到有光亮,他们就知道执行器的一部分正在运行,但黑色斑点意味着他们成功地隔离了这些区域。
试飞成功
一旦他们完善了他们的技术,研究人员就对损坏的执行器进行了测试——一些执行器被许多针刺伤,而另一些则被烧毁了。他们测量了机器人在扑翼、起飞和悬停实验中的表现。
即使 DEA 损坏,修复技术也能使机器人保持其飞行性能,高度、位置和姿态误差与未损坏机器人的偏差仅很小。通过激光手术,原本无法修复的 DEA 能够恢复其 87% 的性能。
“我必须把它交给我的两个学生,他们在驾驶机器人时付出了很多努力。独自驾驶机器人非常困难,更不用说现在我们故意损坏它了,”陈说。
这些修复技术使微型机器人更加坚固,因此 Chen 和他的团队现在正致力于教它们新的功能,比如降落在花朵上或成群飞行。他们还在开发新的控制算法,使机器人可以更好地飞行,教机器人控制偏航角以保持恒定的航向,并使机器人能够携带微型电路,其长期目标是携带自己的能量源。
这项工作部分由国家科学基金会 (NSF) 和 MathWorks 奖学金资助。
推荐阅读
- 笔记本突然没有声音怎么办,笔记本突然没声音了怎么办
- 转子发动机,转子引擎为什么禁赛
- yy动态qq表情包大全软件介绍(yy动态qq表情包大全)
- 奥运主题歌张杰 张靓颖、张杰、易烊千玺……谁来唱响2022北京冬奥会开幕主题曲
- 吉他 尤克里里 区别,如何区分尤克里里和吉他
- 侠盗猎车圣安地斯秘籍/侠盗猎车圣安地斯,作弊码
- 去一趟巴厘岛旅游要多少钱简介
- 苹果6s怎么升级系统,苹果6s怎么设置铃声
- 如何涂指甲油,怎样涂指甲油干得快
- 纪念碑谷艾达的梦攻略第四关,纪念碑谷艾达的梦攻略
- udk虚幻4引擎(游戏开发包工具)软件介绍(udk虚幻4引擎(游戏开发包工具))
- OG梅奥为什么离开nba Pubmed GIST文献月评第十九期(Jun 2018)
- 12306用户名和密码忘记怎么找回账号,12306用户名和密码忘记怎么找回
- 哈尔滨市极乐寺简介
- 二人麻将打法技巧,迅速如何掌握二人麻将技巧
- 故宫门票多少钱一张2021,故宫门票多少钱
- 如何删除微信中的表情包,微信如何删除自己保存的表情
- dnf已经有红字的怎么把红字洗掉,dnf已经洗出红字的装备怎么洗掉
- 海蛏子的家常做法,海蛏子的做法大全
- 微信聊天记录怎么恢复吗,微信聊天记录怎么恢复方法: