蝴蝶机器人是迄今为止最快的游泳软机器人
受蝠鲼生物力学的启发,北卡罗来纳州立大学的研究人员开发了一种节能的软机器人,其游泳速度比以前的游泳软机器人快四倍以上。这些机器人被称为“蝴蝶机器人”,因为它们的游泳动作类似于一个人在游泳蝴蝶泳时手臂的移动方式。
“迄今为止,游泳软机器人的游泳速度还不能超过每秒一个体长,但海洋动物 - 如蝠鲼 - 能够游得更快,更有效率,”Jie Yin说,他是该论文的通讯作者,北卡罗来纳州立大学机械和航空航天工程副教授。“我们想利用这些动物的生物力学,看看我们是否可以开发更快、更节能的软机器人。我们开发的原型工作得非常好。
研究人员开发了两种类型的蝴蝶机器人。其中一个是专门为速度而设计的,能够达到每秒 3.74 个体长的平均速度。第二个被设计为高度机动,能够向右或向左急转弯。这种机动原型能够达到每秒1.7个体长的速度。
“研究空气动力学和生物力学的研究人员使用一种叫做Strouhal数的东西来评估飞行和游泳动物的能源效率,”该论文的第一作者,北卡罗来纳州立大学最近的博士毕业生Yinding Chi说。“当动物游泳或飞行时,峰值推进效率发生在0.2到0.4之间。我们的两个蝴蝶机器人都有这个范围内的Strouhal数字。
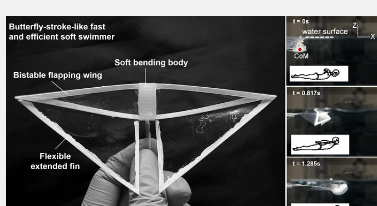
蝴蝶机器人的游泳能力来自它们的翅膀,翅膀是“双稳态”的,这意味着翅膀有两种稳定的状态。翅膀类似于按扣发夹。发夹是稳定的,直到你施加一定的能量(通过弯曲它)。当能量达到临界点时,发夹会卡入不同的形状——这也是稳定的。蝴蝶机器人的视频可以找到。
在蝴蝶机器人中,发夹风格的双稳态翅膀连接到柔软的硅胶身体上。用户通过将空气泵入软体内部的腔室来控制机翼中两种稳定状态之间的切换。当这些腔室膨胀和放气时,身体上下弯曲 - 迫使翅膀随之来回折断。
“以前大多数开发扑翼机器人的尝试都集中在使用电机直接为机翼提供动力,”尹说。“我们的方法使用双稳态机翼,通过移动中央身体被动驱动。这是一个重要的区别,因为它允许简化设计,从而减轻重量。
速度更快的蝴蝶机器人只有一个“驱动单元”——柔软的身体——控制着它的两个翅膀。这使得它非常快,但很难向左或向右转。可操纵的蝴蝶机器人基本上有两个并排连接的驱动单元。这种设计允许用户操纵两侧的机翼,或者只“扇动”一个机翼,这使得它能够进行急转弯。
“这项工作是一个令人兴奋的概念证明,但它有局限性,”尹说。“最明显的是,目前的原型是由细长的管道束缚的,这是我们用来将空气泵入中央主体的。我们目前正在努力开发一个不受束缚的自主版本。
这篇题为“为高速高效、蝴蝶泳姿状的软泳运动员捕捉”的论文将于11月18日发表在开放获取期刊《科学进展》上。该论文由北卡罗来纳州立大学博士生洪耀业共同撰写;以及赵耀和李彦斌,他们是北卡罗来纳州立大学的博士后研究员。这项工作是在国家科学基金会CMMI-2005374和CMMI-2126072的支持下完成的。
推荐阅读
- 怎么设置qq背景,如何设置手机qq的聊天背景为默认的背景
- 2021醉酒驾车的处罚标准是什么,醉酒驾驶怎么处罚2022年,醉酒驾车的处罚标准是什么
- 夏普空调维修服务(夏普空调维修)
- 笔记本电脑聚合物电池和锂电池哪个好,修复笔记本聚合物电池的方法与技巧
- 欧冠欧联杯分配名额,欧冠 欧联杯 欧协杯区别(中超积分榜总排名)
- 2020特岗教师报名时间(2020特岗教师报名时间表)
- 树莓派2和树莓派3的区别(树莓派2和树莓派3对比评测)
- 电脑版qq音乐有没有听歌识曲,电脑版QQ音乐如何听歌识曲
- Intel 酷睿2双核 T6570(intel 酷睿2双核 t6500)
- 自动挡的车怎么开详细教程,自动挡的车怎么开
- 经常刷机会对手机硬件有损害吗文章,经常刷机会对手机硬件有损害吗
- 东京奥运会田径破纪录有哪些选手,东京奥运会田径破纪录有哪些
- 2021安徽省农村信用社联合社招聘100人公告(安徽农村信用社招聘网站)
- 中国中药控股有限公司营销中心是骗子吗(国药集团是骗子)
- 如何更改电脑密码设置,电脑如何更改电脑键盘设置
- 三星安卓系统手机推荐(三星安卓系统手机)
- 铃木吉姆尼改装,吉姆尼改装
- 葛优老婆是谁,葛优老婆个人资料介绍
- 4种催熟香蕉的方法介绍,家庭用催熟生香蕉的方法
- 手机一边充电一边玩是否有害健康,手机一边充电一边玩是否有害