基于人体手臂动力学的机器人空间维护
在轨组装已成为太空操作的一个重要方面,其中机械手在复杂的组装过程中频繁、直接地与物体交互。传统的机械手控制在适应多样化的装配任务方面存在局限性,并且容易受到振动的影响,导致装配失败。针对这一问题,北京理工大学的研究人员基于人体手臂的可变阻尼特性,提出了一种类人可变导纳控制方法。该方法可以有效提高机器人空间装配的安全性、鲁棒性和适应性。该团队于 2023 年 9 月 6 日在《Cyborg and Bionic Systems》上发表了他们的研究结果。
与人类宇航员相比,机器人由于对恶劣太空环境的适应性更强,越来越多地被用于太空维护和维修。这一趋势对于空间技术的发展至关重要,因为它可以帮助减轻空间站中人类的健康风险,并解决太空中修复航天器的挑战。机器人装配是一个重要的研究领域,近年来取得了重要进展。合规控制已成为使机器人执行复杂装配任务的主要方法。然而,柔顺控制对机械手的接触性能提出了很高的要求,使得达到所需的精度和适应性水平具有挑战性。
针对这些挑战,研究人员提出了各种柔顺控制方法,包括阻尼控制、刚度控制、力/位置混合控制和模糊自适应控制算法。这些算法旨在提高机器人执行装配任务时的适应性和效率,特别是在未知环境中。
装配任务经常涉及操纵器和正在装配的物体之间的接触。为了防止过大的接触力损坏物体,需要阻尼来耗散能量并抑制振动。阻尼越大的物体在外力作用下消耗能量的速度越快。人体手臂的肌肉骨骼系统可以灵活调节阻尼,安全稳定地执行各种任务。为了收集接触力和速度等参数,团队建立了一个动态数据采集平台来捕捉人体手臂运动。该系统的主要组件包括运动捕捉子系统和接触力测量子系统。ATI omega160 6D 力传感器用于收集人手与装配部件之间的接触力数据,而人臂的最终速度数据则使用 Stereolabs ZED mini 运动捕捉系统获得。“为了更准确地了解人体手臂的运动特性,我们使用高性能设备对获得的数据进行测量和分析。”北京工业大学研究员肖黄说。
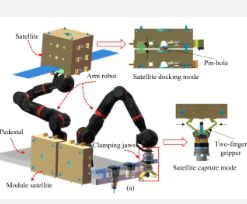
为了让机器人更好地完成装配任务,研究人员通过分析人手臂在装配过程中的运动数据,总结出人类的动态特性,并将这一特性应用到机器人上。此外,由于卫星组装任务多样、接触模式复杂,研究团队分析了卫星组装过程中的各种场景,总结出卫星组装的三种接触模式。北京工业大学研究员曹晓雷表示:“这可以帮助我们更好地模拟机器人卫星装配的接触,并更准确地控制机器人的安全装配。”
通过实验,团队通过地面实验平台进行了空间卫星组装模拟验证。他们的机器人平台能够测量机械臂末端 X、Y 和 Z 方向的力和扭矩。他们将类人变参数导纳控制器应用到机器人卫星组装实验中,成功验证了类人变参数导纳控制器的有效性。
类人控制策略可以提高机器人执行空间组装和维护任务的适应性、精度和可控性。然而,要使机器人能够完成与真人相媲美的灵活装配任务,还需要进一步的研究。还需要能够承受恶劣太空环境的耐用且可靠的机器人。北京工业大学教授姜志宏表示:“人形控制策略的进步可能对未来太空探索和开发产生重要影响,进一步提高任务效率、安全性和可靠性。”
研究团队包括北京工业大学的曹小雷、黄晓、赵岩、李辉、蒋志宏,中国北方车辆研究院的孙泽元;和来自罗马理工大学工业工程系的 Marco Ceccarelli。
该研究得到了国家自然科学基金(U22B2079、62103054、U1913211、U2013602和62273049)的支持。
- 上一篇:女用避孕套使用方法 高清图文
- 下一篇:动物怎么知道午餐时间到了
推荐阅读
- alfa romeo车标含义?(阿尔法罗密欧车标)
- 华为鸿蒙os如何操作 华为鸿蒙os2.0系统官网报名入口
- 14款沃尔沃s60l二手车能买吗?(沃尔沃s60为什么贬值厉害)
- power mp3 wma converter(mp3格式转换器)软件介绍(power mp3 wma converter(mp3格式转换器))
- 42岁李贞贤宣布平安生女,网友:歌声击退山贼的那个
- 热火朝天的高铁WiFi迟迟未到(5G能否破局)
- 华为手机性价比最高是哪几款2022? 华为哪款手机性价比高最值得入手
- 进口捷豹全部车型报价?(捷豹报价大全价格表)
- 韩庚江铠同疑相恋,两人同游马尔代夫遭曝光
- 八卦格字帖软件介绍(八卦格字帖)
- 虚拟机 操作系统(操作系统整合:虚拟机管理程序的下一步)
- 比亚迪f6参数配置?(比亚迪f6)
- 奥沙利文获世锦冠军,奥沙利文得了几次世锦赛冠军
- Evel Knievel手游游戏介绍(Evel Knievel手游)
- 索尼wi1000x拆解(SONYNZW-X1000系列高清拆解图集)
- 4座硬顶敞篷跑车都有哪几款?(4门4座硬顶敞篷车推荐)
- 艺术体操团体全能决赛,艺术体操团体全能决赛中国
- 工人物语6通用修改器游戏介绍(工人物语6通用修改器)
- 简述电机换向器的工作原理图(简述电机换向器的工作原理)
- Atheros-AR5007EG无线网卡驱动软件介绍(Atheros-AR5007EG无线网卡驱动)